এপিকিপিউর এ নিরাপদ এবং দ্রুত APK ডাউনলোড
APKPure বিরুদ্ধ সংকেতচিহ্ন যাচাইকরণ ব্যবহার করে আপনাকে ভাইরাস মুক্ত STEAMXMAKER_BT APK ডাউনলোড উপলব্ধ করানোর জন্য।
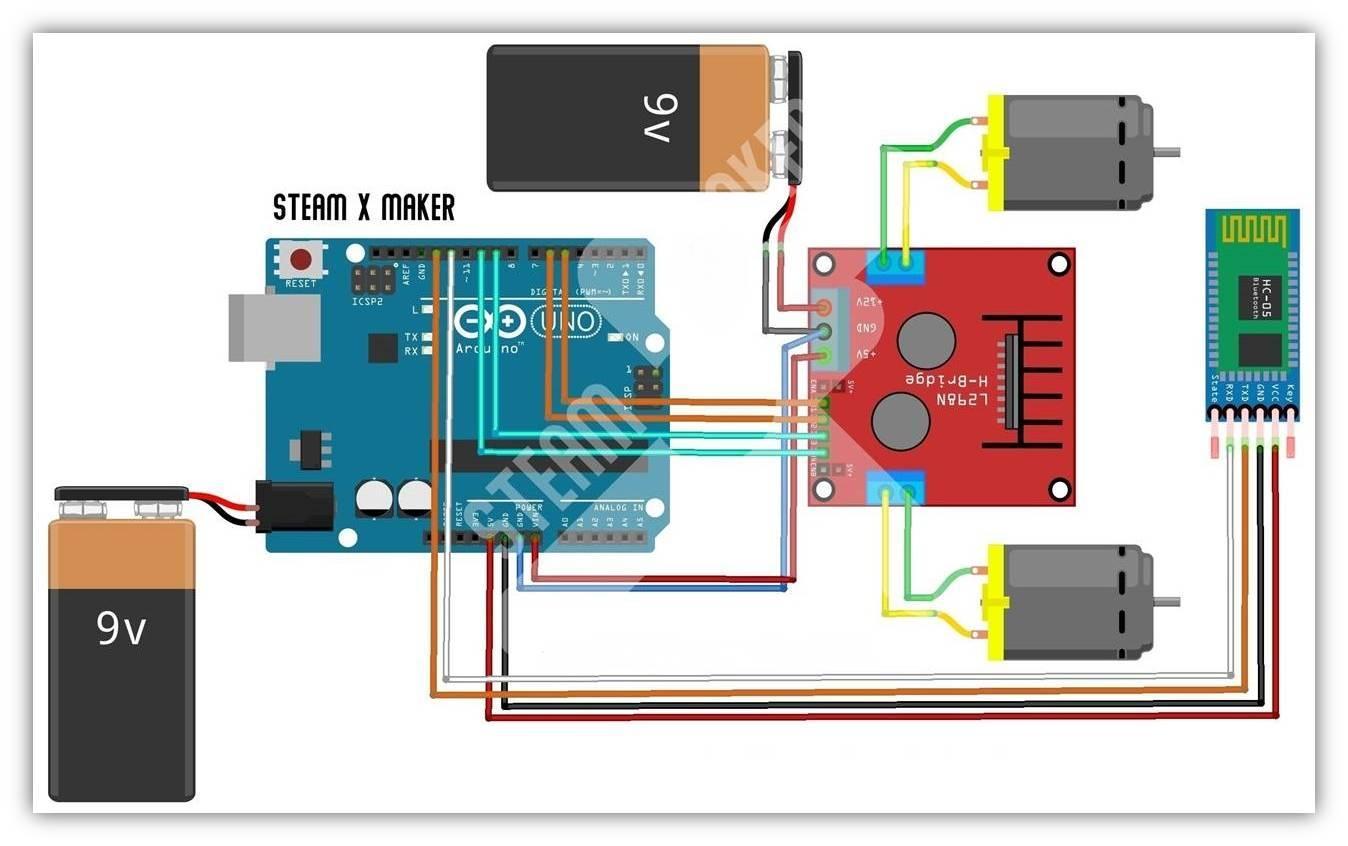
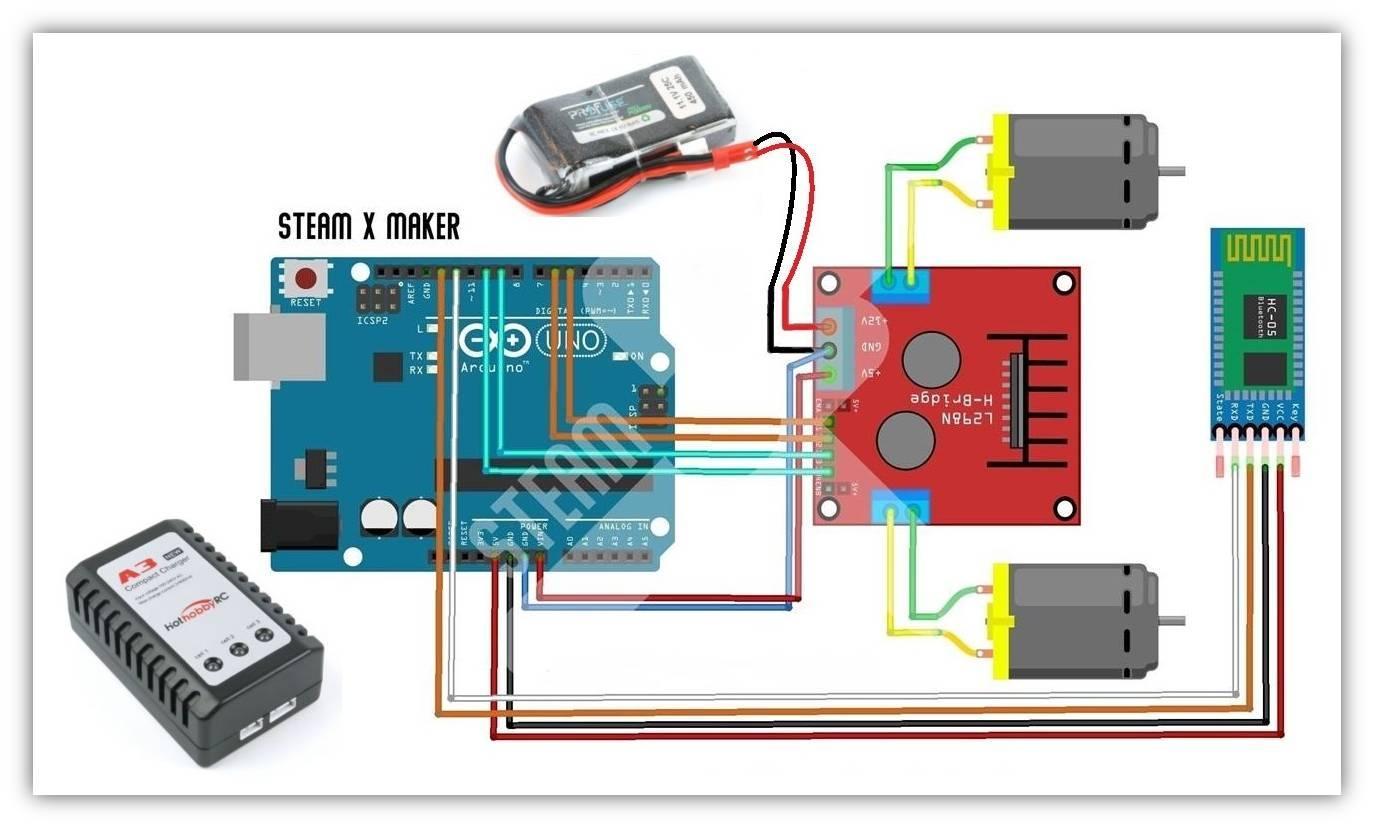
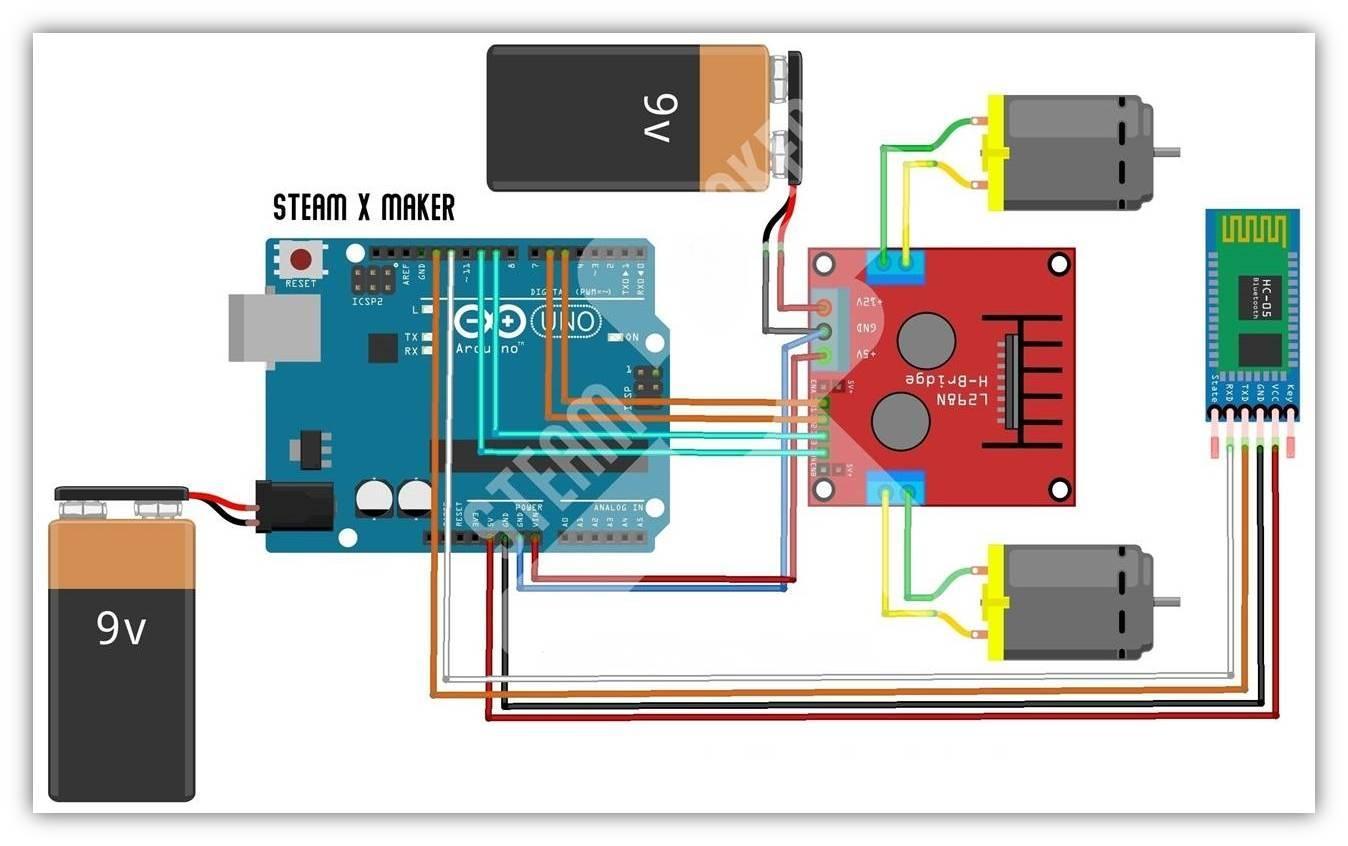
ব্লুটুথ ব্যবহার করে আপনার Arduino- ভিত্তিক গাড়ী নিয়ন্ত্রণ করুন।
অর্ডার পদক্ষেপগুলি অনুসরণ করুন
1. আপনি যে ফোন বা ট্যাবলেটটি ব্যবহার করবেন তা অবশ্যই অ্যান্ড্রয়েড ভিত্তিক be
2. Hc05 বা Hc06 ব্লুটুথ মডিউল সক্রিয় করার জন্য প্রয়োজনীয় বিদ্যুৎ সরবরাহ ইনস্টল করুন।
৩. সমস্ত সংযোগ যদি সঠিক হয় তবে আপনার ব্লুটুথ মডিউলের আলো চালু হবে এবং আপনার মডিউলটি সক্রিয় হবে।
৪. প্রথমে ফোনের নিজস্ব সেটিংসের মাধ্যমে ব্লুটুথ মডিউলটি সন্ধান করুন। আপনি HC05 বা HC06 নামটি জুড়ে আসবেন।
৫. এখন আপনার ফোনের সাথে এই ব্লুটুথ মডিউলটি জুড়ুন।
6. আপনার ফোনে অবতরণ করা অ্যাপটি খুলুন এবং সংযোগ স্থাপনের জন্য ব্লুটুথ অনুমতি অনুরোধটি নিশ্চিত করুন। আপনি যে পর্দায় উঠে এসেছেন তাতে Hc05 বা Hc06 দেখতে পাবেন। নির্বাচন করুন ...
Your. আপনার নির্বাচনের পরে, আপনার অ্যাপ্লিকেশনটি আপনার মডিউলটির সাথে মিলবে। (সুতরাং প্রথমে আপনাকে ফোনের সাথে এবং তারপরে অ্যাপ্লিকেশনটির সাথে জুড়ি দেওয়া দরকার))
৮. ফোনের সাথে ব্লুটুথের জুটি তৈরি হয়ে গেলে - এইচসি -06 - এ হালকা ফ্ল্যাশ করা -> অবিচ্ছিন্নভাবে চালু হয়।
- এইচসি -05 তে আলো জ্বলছে -> আরও দীর্ঘ বিরতিতে জ্বলজ্বল
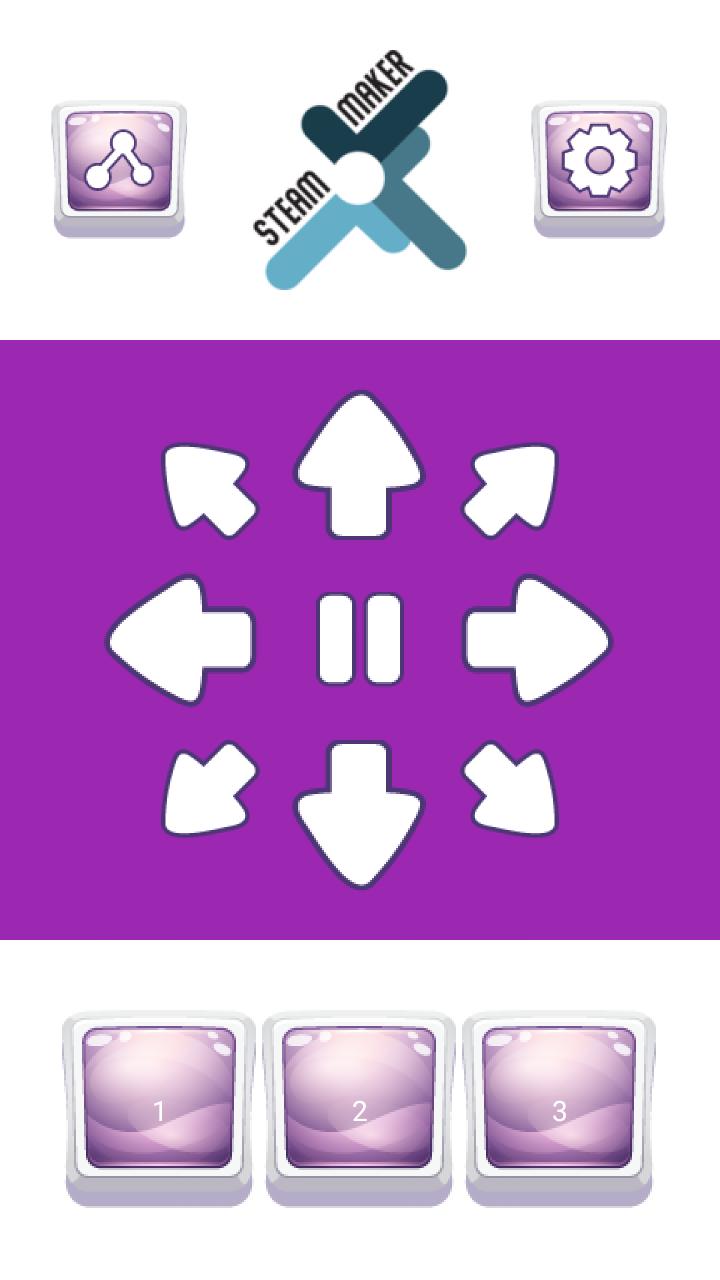
দ্রষ্টব্য: আপনি শিঙা, হেডলাইট, স্কিড ইত্যাদি বৈশিষ্ট্যগুলির জন্য অ্যাপ্লিকেশনটিতে 1,2 এবং 3 বোতামগুলি কাস্টমাইজ করতে পারেন You
এখন আপনার কোডগুলি সম্পাদনা করে আপনার কাজটি পরীক্ষা করুন এবং প্রয়োজনীয় সামঞ্জস্য করুন।
# অন্তর্ভুক্ত সফটওয়্যারশিয়ার যোগাযোগ (13, 12);
// টিএক্স এবং আরএক্স পিনগুলি সংজ্ঞায়িত করা হয়েছে
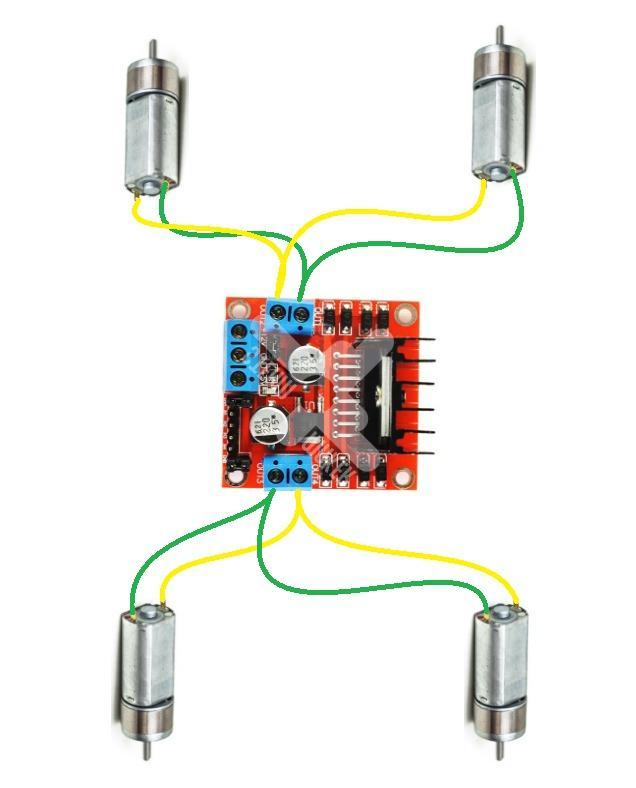
কনট ইন IN1 = 5;
কনট ইনএন 2 = 6;
// L298N বাম মোটর কন্ট্রোল সংযোগগুলি IN1 পিন 5, IN2 পিন 6 এ নিযুক্ত করা হয়েছে
কনট IN3 = 9;
কনট IN4 = 10;
// L298N সঠিক মোটর নিয়ন্ত্রণ সংযোগ IN3 পিন 9, IN4 পিন 10 সহ নির্ধারিত হয়েছে
স্ট্রিং রিডস্ট্রিং;
// ব্লুটুথ ডেটা পড়া শুরু হয়েছে
অকার্যকর সেটআপ ()
{
পিনমোড (IN1, OUTPUT);
পিনমোড (IN2, আউটপুট);
পিনমোড (IN3, আউটপুট);
পিনমোড (IN4, আউটপুট);
// IN1, IN2, IN3 এবং IN4 পিনগুলি OUTPUT পিন হিসাবে বরাদ্দ করা হয়েছে
iletisim.beg (9600); // ব্লুটুথ যোগাযোগ শুরু হয়েছে
Serial.beg (9600); // সিরিয়াল মনিটরের কাজ শুরু হয়েছে
}
অকার্যকর লুপ ()
{
যখন (যোগাযোগ.উপলভ্য ())
{
বিলম্ব (10);
চর সি = কন্টাক্ট.ড্রেড ();
পঠন স্ট্রিং + = সি;
}
যদি (রিড স্ট্রিং.লেন্থ ()> 0)
{
Serial.println (ReadString);
যদি (রিড স্ট্রিং == "স্টপ")
{
অ্যানালগ রাইট (IN1, 0);
অ্যানালগ রাইট (IN2, 0);
অ্যানালগ রাইট (IN3, 0);
অ্যানালগ রাইট (আইএন 4, 0);
}
অন্যথায় যদি (রিড স্ট্রিং == "নেক্সট")
{
অ্যানালগ রাইট (IN1, 0);
অ্যানালগ রাইট (IN2, 255);
অ্যানালগ রাইট (IN3, 255);
অ্যানালগ রাইট (আইএন 4, 0);
}
অন্যথায় যদি (রিড স্ট্রিং == "পিছনে")
{
অ্যানালগ রাইট (IN1, 255);
অ্যানালগ রাইট (IN2, 0);
অ্যানালগ রাইট (IN3, 0);
অ্যানালগ রাইট (IN4, 255);
}
অন্যথায় যদি (রিড স্ট্রিং == "LEFT")
// ডান চাকা এগিয়ে, বাম চাকা ফিরে আসতে হবে
{
অ্যানালগ রাইট (IN1, 255);
অ্যানালগ রাইট (IN2, 0);
অ্যানালগ রাইট (IN3, 255);
অ্যানালগ রাইট (আইএন 4, 0);
}
অন্যথায় যদি (রিড স্ট্রিং == "এসএজি")
// বাম চাকাগুলি এগিয়ে যেতে হবে, ডান চাকাগুলি ফিরে ফেলা উচিত
{
অ্যানালগ রাইট (IN1, 0);
অ্যানালগ রাইট (IN2, 255);
অ্যানালগ রাইট (IN3, 0);
অ্যানালগ রাইট (IN4, 255);
}
অন্যথায় যদি (রিড স্ট্রিং == "সাগাসাগি") থাকে
// সমস্ত চাকা পিছন দিকে যায়। তবে বাম চাকাগুলি দ্রুত স্পিন করা উচিত
{
অ্যানালগ রাইট (IN1, 255);
অ্যানালগ রাইট (IN2, 0);
অ্যানালগ রাইট (IN3, 0);
অ্যানালগ রাইট (IN4, 125);
}
অন্যথায় যদি (readString == "SOLASAGI") // সমস্ত চাকা পিছন দিকে যায়। তবে ডান চাকাগুলি দ্রুত স্পিন করা উচিত
{
অ্যানালগ রাইট (IN1, 125);
অ্যানালগ রাইট (IN2, 0);
অ্যানালগ রাইট (IN3, 0);
অ্যানালগ রাইট (IN4, 255);
}
অন্যথায় যদি (রিড স্ট্রিং == "আপট্যাক")
// সমস্ত চাকা এগিয়ে যায়। তবে বাম চাকাগুলি দ্রুত স্পিন করা উচিত
{
অ্যানালগ রাইট (IN1, 0);
অ্যানালগ রাইট (IN2, 255);
অ্যানালগ রাইট (IN3, 125);
অ্যানালগ রাইট (আইএন 4, 0);
}
অন্যথায় যদি (readString == "LEFT")
// সমস্ত চাকা এগিয়ে যায়। তবে ডান চাকাগুলি দ্রুত স্পিন করা উচিত
{
অ্যানালগ রাইট (IN1, 0);
অ্যানালগ রাইট (IN2, 124);
অ্যানালগ রাইট (IN3, 255);
অ্যানালগ রাইট (আইএন 4, 0);
}
পঠন স্ট্রিং = "";
// এটি ব্লুটুথের মাধ্যমে যোগাযোগের অবিচ্ছিন্ন নিয়ন্ত্রণ সরবরাহ করে।
}
}



Android-এ XAPK/APK ফাইল ইনস্টল করতে এক-ক্লিক করুন!
আপনার রেটিং এবং প্রতিক্রিয়া জন্য ধন্যবাদ!
আপনি ইতিমধ্যে রেট করেছেন।