APKPure에서 안전하고 빠른 APK 다운로드
APKPure는 바이러스 없는 Arduino Robot Joystick APK 다운로드를 위해 서명 확인을 사용합니다.
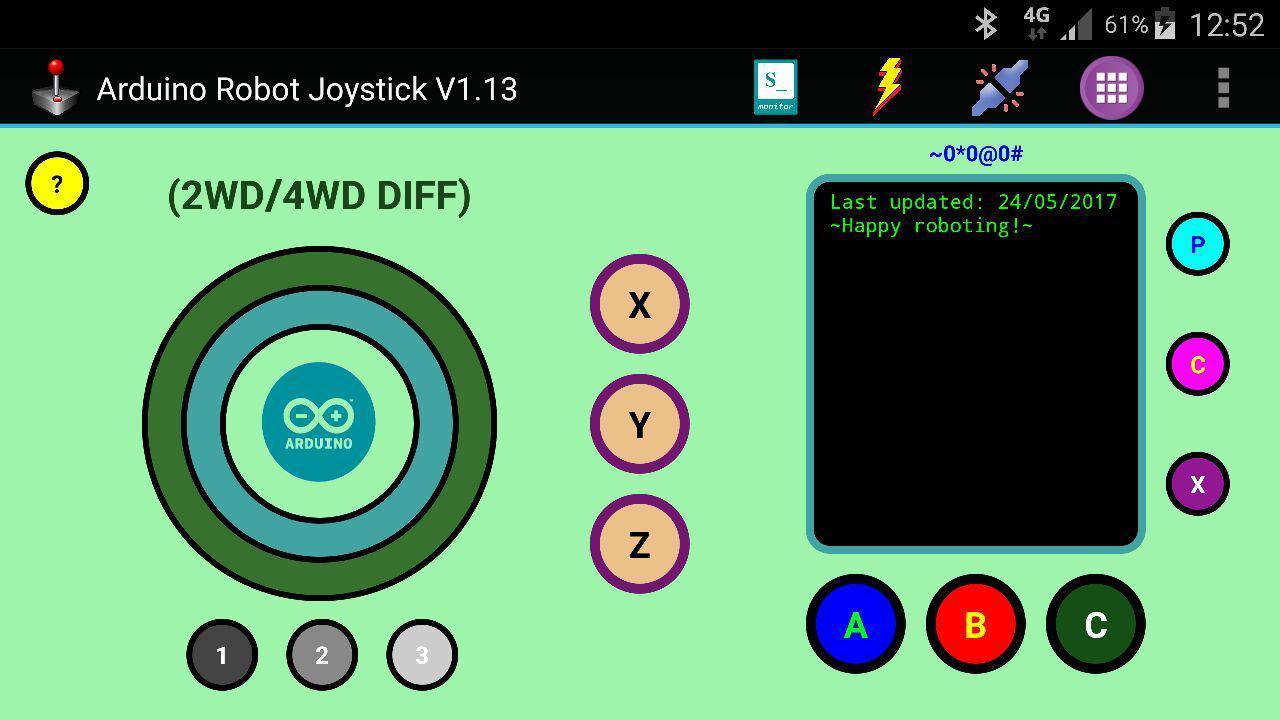
차동 / 전 방향 드라이브 아두 이노 기반의 로봇 조이스틱 응용 프로그램
이 응용 프로그램은 (이에 국한되지 않음) 아두 이노 기반의 조이스틱 인터페이스 로봇 응용 프로그램으로 사용할 수 있도록 최선을 다하고 있습니다.
그것은 이러한 HC-05, HC-06 또는 블루투스 비 블루투스 통신 모듈을 사용하여 하드웨어에 접속 될 수있다.
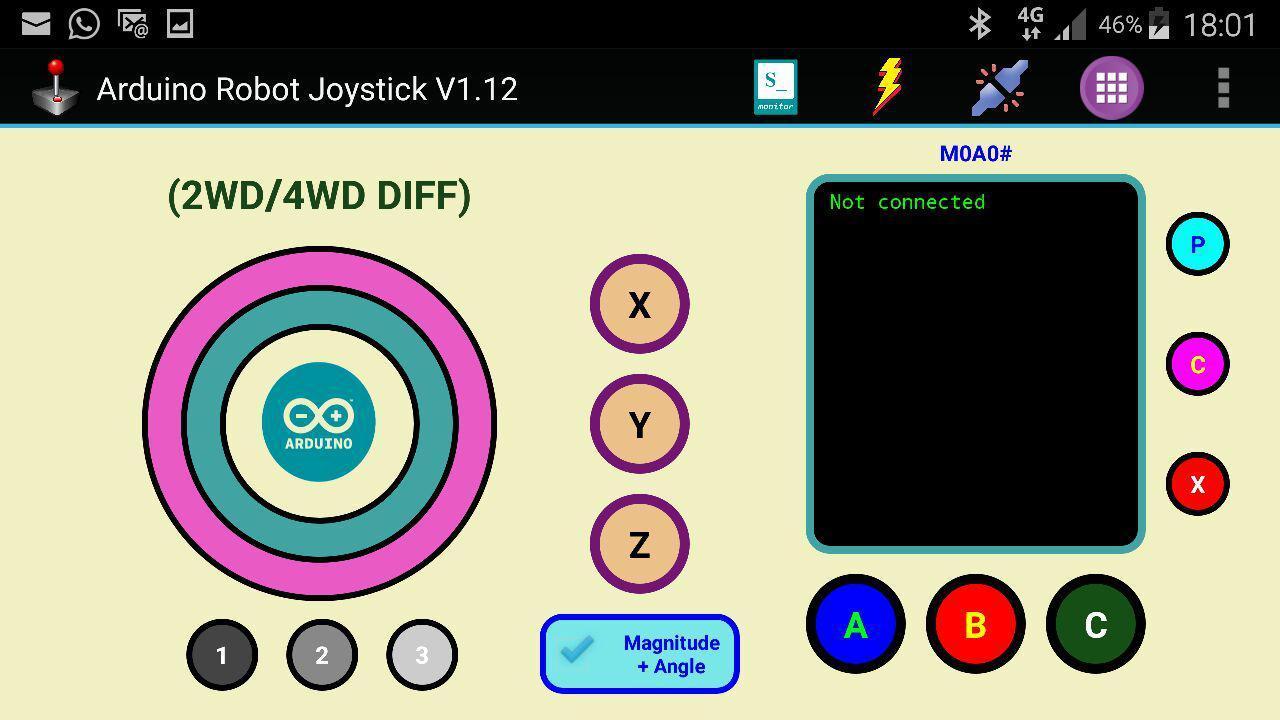
직렬 출력은 차동 2WD / 4WD 무 지향성 조정 헤더 (하나 또는 3WD 4WD) 로봇 휠 구성 (설정 메뉴를 통해 액세스 할 수 있음)에 대한 수학 식 세트이다.
그러나 사용자는 "일반 / 수식 출력 모드"메뉴를 통해 원시 X 및 Y 값을하고 같은 메뉴를 이용하여 사용자의 편의를 다시 식 모드로 복귀 출력을 설정할 수있다.
다른 것보다, 당신은 또한 현재의 방향과 각도에 따라 조이스틱의 크기와 각도의 원시 형태를 얻을 수 있습니다.
이 앱은 현재 사용자의 편의를 위해 시리얼 모니터 창을 갖추고있다. 필요가 더 이상 PC에서 시리얼 모니터를 사용하지 않으려면 (따라서 더 USB 케이블이 필요하지 않습니다).
당신은 쉽게 그들이 설정 메뉴를 사용하여 직렬 출력을 통해 보내 텍스트를 설정할 수 있습니다 보드의 6 개 버튼이 있습니다.
적절한 아두 이노 프로그램이나 스케치의 요구는 쉽게 하나의 자신을 만들 수 있습니다이 응용 프로그램에 의해 전송 된 일련의 문자열을 구문 분석하기 위해 사용합니다.
당신은 샘플 아두 이노 코드를해야하는 경우 이메일을 통해 저에게 연락 할 수 있습니다.
모든 문제는 이메일을 통해 저에게 연락 주저하지 말아 주시기 바랍니다.
고맙습니다.






등급과 피드백에 감사드립니다!
당신은 이미 평가했습니다.